




ユーザー事例:
倉庫用ケーブルロボットの振動制御







課題
広大な空間を高速で移動するロボットを設計する場合、動きや振動を正確に制御することは、容易ではありません。ウォータールー大学の高速ロボット研究室のメンバーであるHamed Jamshidifar博士は、新しいロボット技術の開発に役立つ技術を研究しています。Jamshidifar博士は、彼のプロジェクトで、倉庫用ケーブルロボットの動きを正確に制御するための新しい技術を必要としていました。彼が求めたモデリング技術は、該当のロボットシステムに見られるような、ケーブルシステムの複雑なダイナミクスを考慮する必要がありました。
解決策
Jamshidifar博士は、Maplesoftのモデリング・シミュレーションツールMapleSimを使用して、倉庫用ケーブルロボットの力学的モデルを開発しました。博士は、MapleSimの専用ライブラリ「Ropes and Pulleys」を使用することで、ロボットの動きと不要な振動を正確に反映させるモデルを構築できました。MapleSimで十分に詳細なモデルを作成することで、Jamshidifar博士は、ロボットの動きや環境との相互作用の際に発生する振動や、振動を制御するための制御手法を開発し、テストすることができました。
結果
MapleSimで開発したモデルを用いて、Jamshidifar博士は、ロボットの振動を制御するシミュレーションベースのソリューションを実証することに成功しました。モデルは、精度を検証するために小規模なロボットプロトタイプをベースに作成されました。シミュレーションでは、不要な振動の存在が確認されました。これらの振動は、MapleSimに実装された制御手法によって大幅に低減されました。Jamshidifar博士は、将来これらのロボットが商業的に利用されるようになるまで、MapleSimモデルを使用して、振動の制御、最小化に挑戦し続けていきます。
産業用オートメーションとロボットの設計の分野では、開発のあらゆる段階でエンジニアリング上の課題が発生します。産業界では、スピードが効率性を左右する重要な要素であるため、機械は可能な限り高速に動作することが求められます。しかし、機械の高速化に伴い、新たな複雑な問題が発生します。機械を高速で動作させる場合、方向と速度の両方の変化により、機械部品に大きな力がかかります。高速機械の適切な制御手法がなければ、エンジニアは、機械の部品を損傷し、機械やその近くにいるオペレーターの安全を脅かす危険性があります。
ウォータールー大学の高速ロボット研究室のメンバーであるHamed Jamshidifar博士は、新しいロボット技術の開発に役立つ技術を研究しています。高速ロボティクスのダイナミクスを理解するために、モデリングとシミュレーションを重要な戦略として用いています。最近のプロジェクトでは、高速倉庫用ケーブルロボットのダイナミクスを研究しています。このロボットは、広い作業場で製品を高速で移動させる必要のある倉庫での使用を目的としています。ケーブルシステムを利用してロボットを移動させることで、Jamshidifar博士の設計は、従来の倉庫用ロボットよりも高速に動作させることができます。
新設計のロボットで高速性を実現するためには、動作と振動の制御が重要な役割を果たします。忠実なマシンコントローラがなければ、ケーブル駆動のロボットは不要な振動や、その他の意図しない動きの影響を受けやすく、性能を阻害したり、作動モーターや周囲の環境にダメージを与えたりする危険性があります。Jamshidifar博士は、ロボットのダイナミクスを理解し、振動を正確に最小化・制御できる制御システムを開発するためのキーテクノロジーとして、Maplesoftのモデリング・シミュレーションツールMapleSimを選択しました。他のモデリング・シミュレーションツールも存在しますが、MapleSimには専用のRopes and Pulleys Libraryが用意されていたため、ケーブルダイナミクスを簡単にシミュレーションに取り入れることができました。
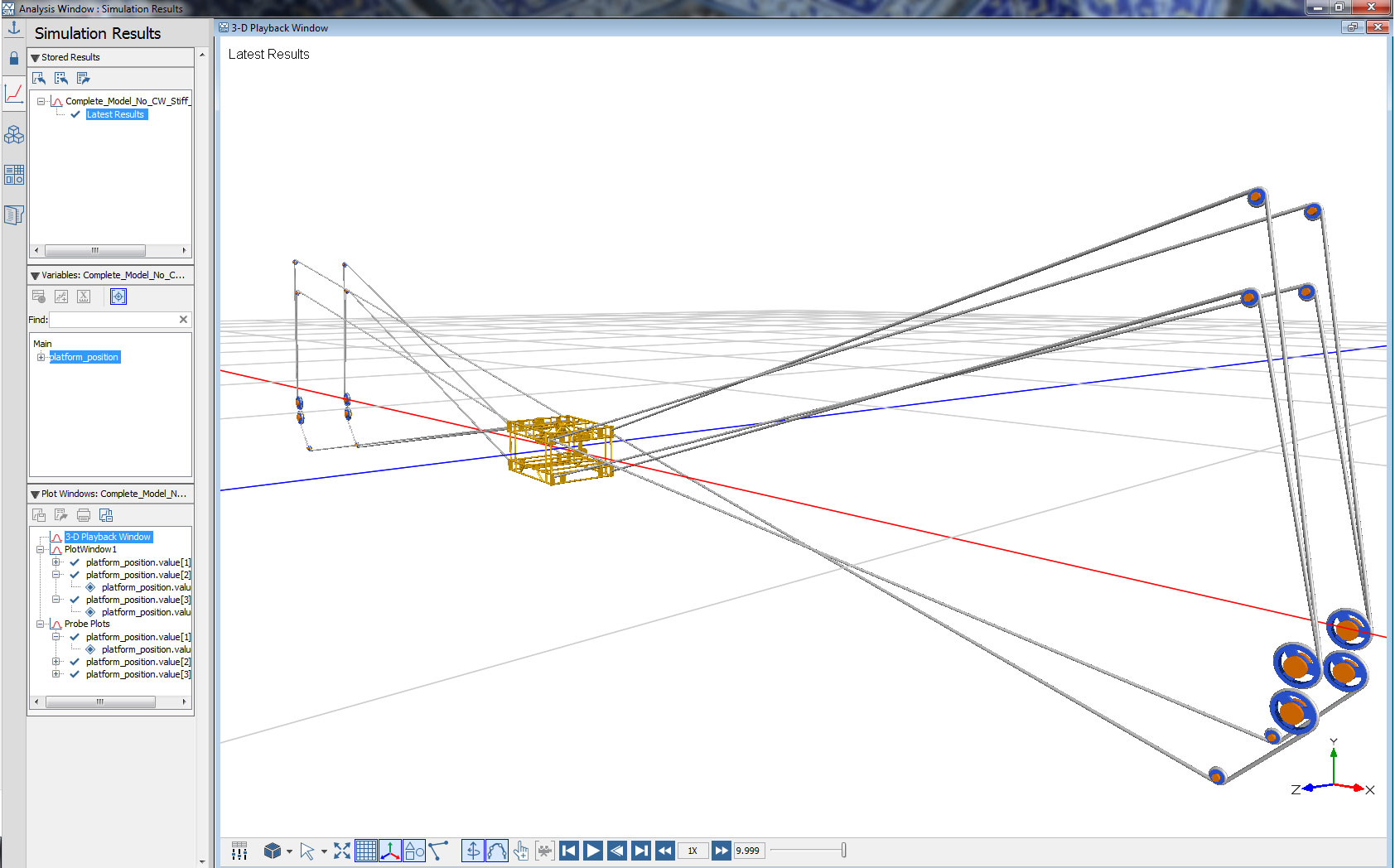
図1:MapleSimでJamshidifar博士のモデルを3Dで可視化したもの。
MapleSimでロボットモデルを作成するために、Jamshidifar博士は、ロボットの移動プラットフォームの既存のCADモデルをインポートしました。CADモデルをインポートすることで、プラットフォームの形状、質量や慣性の情報、視覚化のための3Dモデルの情報を自動的にインポートすることができました。その後、滑車、ウィンチ、ケーブルなど、MapleSimの標準的なコンポーネントを接続して、モデルを完成させました。モデルをテストするために、ウィンチを単純な力で作動させ、長方形のモーションパスに沿ったロボットの動きをシミュレーションしました。
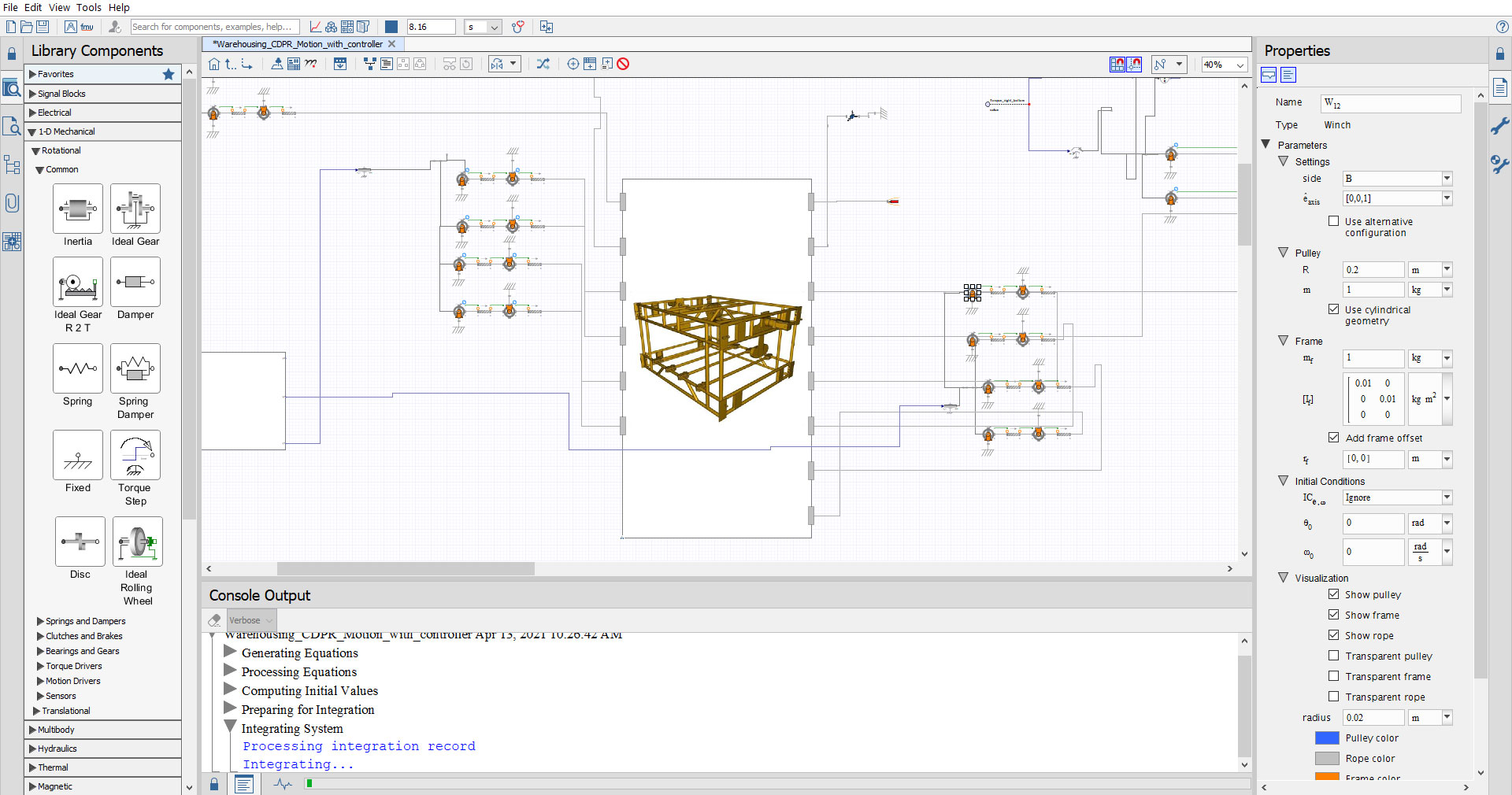
図2:MapleSimでの倉庫用ケーブルロボットモデル。中央のプラットフォームがケーブルとウインチシステムに接続されている様子。ウィンチのパラメータはMapleSimのワークスペースの右側に表示されている。
モデルの精度を検証するために、シミュレーション結果を、以前に構築した小規模な試作品比較しました。これにより、MapleSimモデルの基本的なダイナミクスが、操作時に期待される結果と一致していることを確認しました。
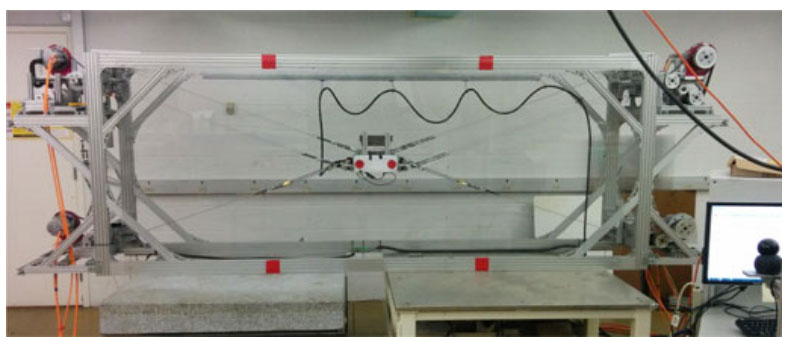
図3:ケーブル駆動式倉庫管理ロボットの小規模な試作品。
ロボットのシミュレーション結果は、事前にインポートしたCADと滑車システムの3D表現を組み合わせてMapleSimで可視化することができました。初期のシミュレーション結果では、中央のプラットフォームの振動が問題となっていました。適切な動作制御を行わないと、この振動によってロボットの動作速度と安全性が制限されてしまいます。このMapleSimモデルを使用して、振動を最小限に抑えつつ、安全な動作速度を最大化するための様々な制御戦略をテストし、検証しました。
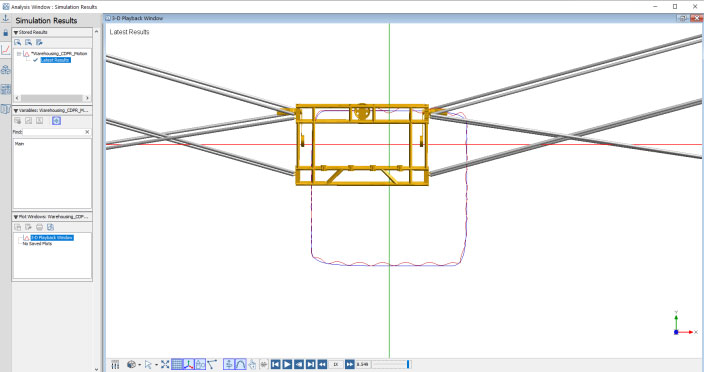
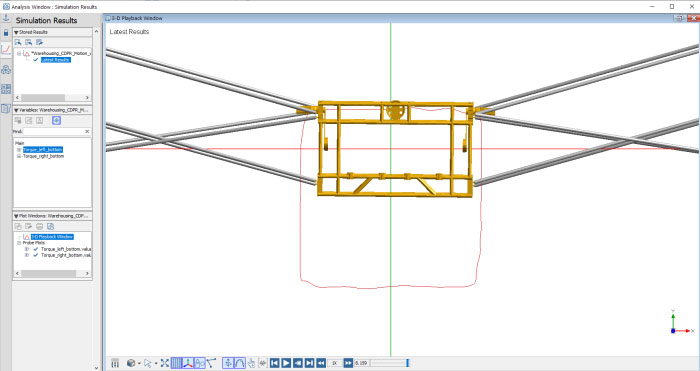
図4:倉庫用ロボットモデルの平面振動の結果。動作制御を使用しない場合は振動しているのがわかる(左)が、動作制御を使用するとプラットフォームの動きが安定するのがわかる(右)。
Jamshidifar博士は、ケーブル駆動の倉庫用ロボットの不要な振動が、適切な制御手法によって最小限に抑えられることを実証できました。MapleSimモデル上で先に様々な問題を検討・解消できるため、研究開発にMapleSimを使い続けることは、試作品を開発する際に問題が発生する可能性を最小限に抑えることができるでしょう。。Jamshidifar博士は、ロボットモデルの開発を続ける中で、MapleSimモデルを使って制御戦略やアルゴリズムを正確に開発し、より速く、より優れたロボットを倉庫用アプリケーションとして市場に投入することを計画しています。現在、チームは実物大の試作品を開発しており、将来的にはこのロボットを商業市場に投入する予定です。

図5:倉庫用ケーブルロボットの実物大の試作品。